
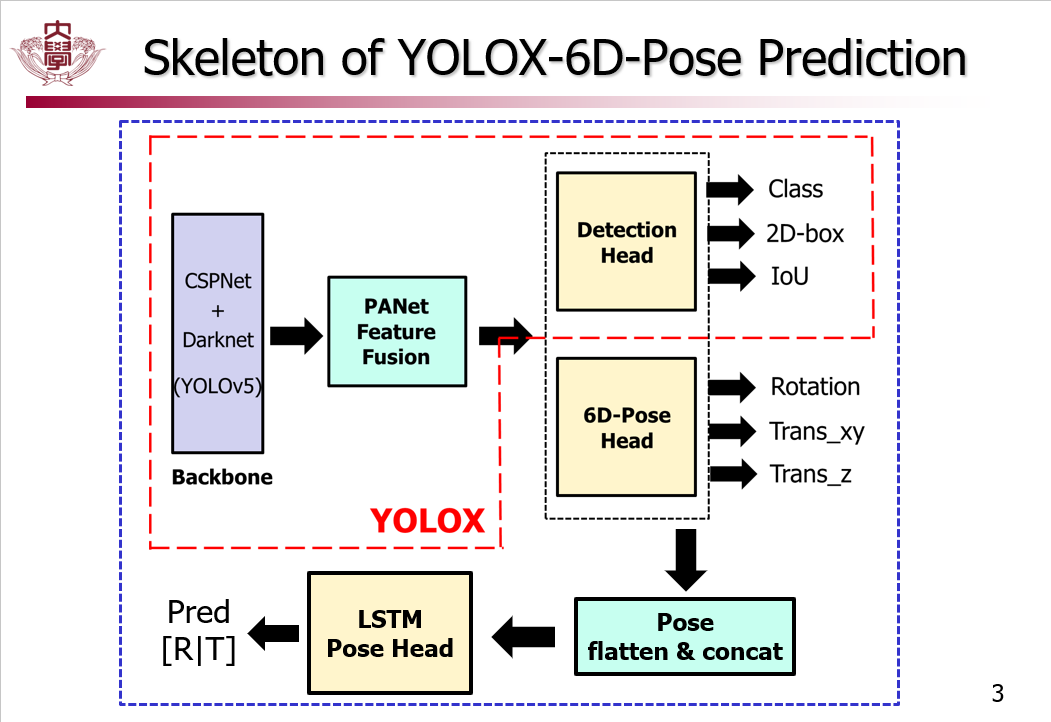
本周主要针对1ms系统的GPU侧进行了调研。对于Pose Estimation网络部分,找了许多最新的工作,暂时选定了YOLOX-6D-Pose网络为baseline。目前对该网络只进行了YCBV官方数据集的训练和测试,未来的一个月内计划进行自己数据集的加载和预测头(LSTM-Head或者Transformer)的添加。
如下图,最下方的两个小模块就是我想要添加的部分:
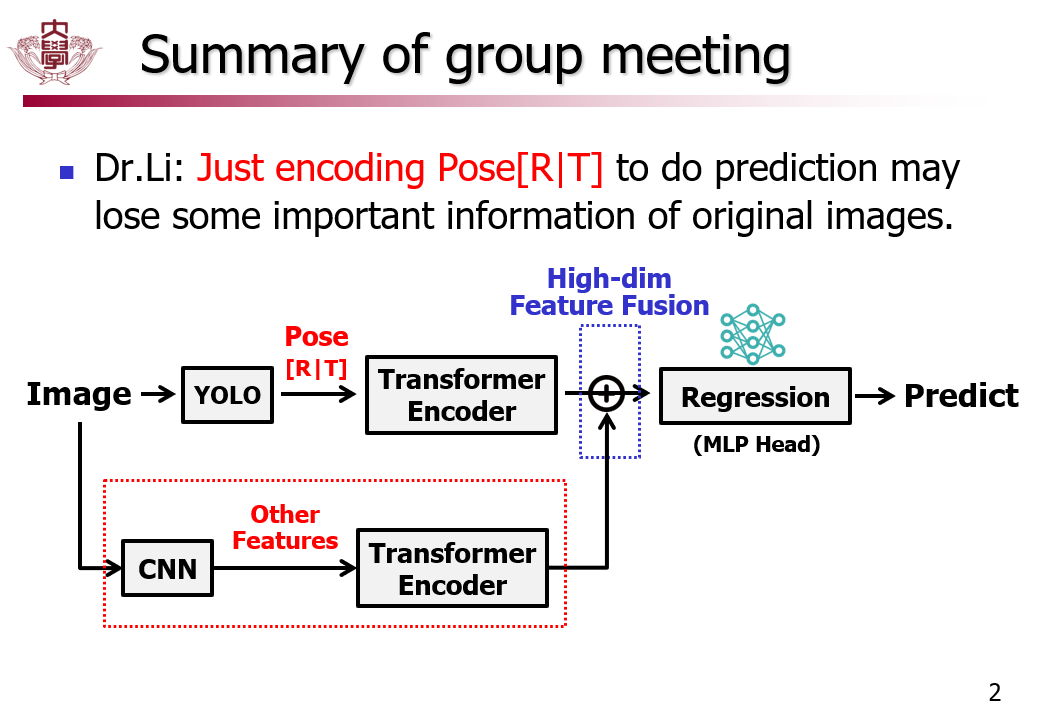
基于RGB原图像序列预测 or 基于Pose参数预测?
对于本次会议最后提出的问题:进行预测时是基于RGB图像直接encode,还是基于回归得到的Pose参数进行encode好呢?这个问题的起因是我阅读了学长Head Pose Detection的修士论文,发现他是直接对RGB原图像进行transformer,attention等操作的,和我的架构不太一样。李博给出的回答是:
- 从RGB图像回归到Pose参数,这个过程本身就是对RGB图像某个特定的特征的一种提取操作,因此不可避免会损失一些其他重要的信息。因此,目前的架构仅仅给Transformer投喂Pose参数,作为预测的唯一基准,效果恐怕不是很好。
很有道理,因此,我有了如下的修改预想:
下周的工作 ———— FPGA侧的思考
教授一再催促要开始FPGA侧的思考和调研了,下周开始。计划是阅读李博在FPGA上实现hardwired-CNN部署的代码,顺便摸索1ms系统的接口框架。

